차량인간공학 실험실
Humans and Vehicle Automation Laboratory
Research
- HOME
- Research
- Research
Research
Current Projects
Child UX를 고려한 가변 모듈형 내부 공간 활용 시나리오
Sponsor: 현대NGV; 2024.04-2024.05
본 연구의 목적은 어린이 사용자 경험(UX)을 최적화하기 위해 가변 모듈형 내부 공간 활용 시나리오를 도출하는 것이다. 이를 위해 HuVA 연구팀은 어린이의 신체적, 인지적 특성을 반영한 UX 시나리오 개발에 초점을 맞춰, 이를 위한 산업 동향 및 관련 문헌 연구를 수행할 예정이다. 이를 기반으로 어린이가 내부 공간과 상호작용 과정에서 가변 요소나 적용 기술을 정의한다.

자율주행 사용자 기반 인증용 근거 확보를 위한 자율주행 UX 기준/가이드라인 개발
Sponsor: 현대자동차; 2024.01-2024.12
본 연구는 자율주행 기능에 대한 사용성 평가 및 HMI 가이드라인 근거 데이터를 취득하고, HMI(Human-Machine Interaction) 가이드라인을 개발하는데에 목적이 있다. HuVA 연구팀은 본 목표를 달성하기 위해 사용자 관점에서의 자율주행 기술 평가 지표를 개발 및 그 평가 방법을 고안하여, 사용자 중심의 자율주행 기술 사용성과 자율주행 기술의 UX평가를 진행한다.

T-Car 기반 자율주행 인지예측/지능제어 차량부품/시스템 통합평가 기술개발
Sponsor: 산업통상자원부; 2022.04-2027.12
본 연구의 목표는 Lv.4+ 자율주행 Test Car(T-Car) 글로벌 테스트 플랫폼 구축 및 테스트 규격화를 실현하는 것이다. HuVA 연구팀은 연구 목표를 달성하기 위해, Lv.4 HMI 가이드라인 개발, 탑승자 상호작용 시뮬레이션 환경 설계 및 구축, HMI 플랫폼 평가 기술 개발 연구를 진행할 예정이다. 이는 자율주행시스템 연계 Human Factor 시험규격 개발을 위한 연구 자료로 활용된다.

시뮬레이터를 활용한 미래 모빌리티 HMI 이슈 연구
Sponsor: 한국연구재단; 2021.03-2024.02
본 연구는 시뮬레이터를 활용하여 미래 모빌리티의 HMI이슈 연구를 목표로 한다. HuVA연구팀은 1차년도에 부분자율주행 HMI taxonomy 연구 및 자율주행 해제 원인 분석 연구를, 2차년도에 미래 모빌리티 사용자 감성 및 안락감 평가 연구, 3차년도에 확장형 미래 모빌리티 인터랙션 연구를 진행할 예정이다.

Previous Projects
차량 디지털 헬스케어 UX 기술 발전 방향
Sponsor: 현대모비스; 2023.06-2023.11
본 과제의 목표는 문헌 기반으로 차량 디지털 헬스케어 UX 기술을 조사하고 발전 방향을 제시하는 것이다. 연구 내용은 미래 차량에 적용할 수 있는 UX 기술을 제안하는 데 활용될 수 있다

운전자 감정인식 검증기술 개발
Sponsor: 현대자동차 선행기술원; 2022.10-2023.09
본 연구의 목표는 운전자의 감정 상태에 따라 변화하는 생체 신호를 측정하고, 운전자 감정 인식 기술의 검증을 진행하는 것이다. 연구 결과는 차량 시스템이 운전자의 감정 상태에 따라 적절한 서비스를 제공하는데 사용될 수 있다.

멀미 저감 지표 개발
Sponsor: 현대모비스; 2022.01-2022.10
본 연구의 목표는 멀미를 저감할 수 있는 시각, 청각, 후각, 촉각 등의 멀미 인자를 도출하는 것이다. HuVA 연구팀은 연구 목표를 달성하기 위해, 시뮬레이터와 실차 실험을 거쳐 운전자의 생체 데이터를 기반으로 멀미 저감 효과를 평가한다. 연구 결과는 멀미 저감 지표 개발 및 상용화의 기초 자료로 활용될 예정이다.

딥러닝 기반의 MDPS 위치 제어기 최적화 모델 및 HOD 모델 개발
Sponsor: 현대모비스; 2021.09-2022.08
본 연구는 조향 부문에 AI 기술을 접목하여 자율주행의 경쟁력과 역량을 강화시키기 위한 목적으로 진행된다. 딥러닝을 활용하여 자율주행 차량의 Lane Keeping Assistance(LKA) 로직 작동 시 목표 조향의 추종성을 향상시키고, 운전자의 스티어링 파지 여부(hands on/off)를 판단한다. 이는 자율주행 차량에서의 조향 부분 상용화를 위한 연구 자료로 활용된다.

자율주행차 제어권 인수 검증을 위한 운전자 위험 시나리오 및 대응기술 개발
Sponsor: 현대자동차 남양연구소; 2021.05-2022.05
본 연구는 자율주행 3단계에서 예상되는 사용자 오남용 시나리오 DB를 확보 및 설계하고 제어권 인수 검증 기술 데모를 진행한다. 운전자의 제어권 전환 상황 인지 여부를 판단하여 제어권 미인수시 자율주행 시스템이 긴급 대응 기술을 전개하는 프로세스를 설계한다. 이는 제어권 전환 안전성 확보에 대한 연구 자료로 활용된다.

뇌파 기반 운전자 부주의 저감 장치 개발
Sponsor: 현대모비스; 2021.05-2021.12
본 연구의 목표는 운전자 부주의 저감 알림이 버스 운전자 각성에 효과가 있었는지 평가하는 것이다. HuVA 연구팀은 연구 목표를 달성하기 위해, 버스 운전자의 생체 데이터와 실차 주행 데이터를 기반으로 운전자의 각성도를 분석하고 알림의 효과를 평가한다. 연구 결과는 운전자 부주의 알림 개발 및 상용화의 기초 자료로 활용될 예정이다.

AI 및 커넥티비티 기술 기반 미래모빌리티 위한 운전자 특성 및 감정 고려한 지능형 주행 모드 개발
Sponsor: 현대자동차 남양연구소; 2021.03-2021.11
본 연구는 실차 기반으로 주행 환경에서의 운전자의 상태 및 운전성향 데이터를 취득할 수 있도록 실험을 설계 및 진행한다. 운전자에게 취득되는 데이터는 운전자의 상태를 판단하고 개인화하는데 사용되며, 이는 지능형 주행모드 개발에 대한 기초 연구자료로 사용된다.

자율주행자동차 차량 내 인테리어 시스템 연구
Sponsor: 현대자동차 남양연구소; 2020.05-2020.11
본 연구의 목적은 차량 내 인테리어 시스템 구성에 따른 차량 탑승자의 주행 감성을 평가한다. 목적을 달성하기 위해, 인테리어 플랙서블 벅이 적용된 가상환경기반 시뮬레이터 실험을 진행하며, 도출된 결과를 기반으로 시뮬레이터 주행 감성 평가 방법을 개발하고자 한다.

미래 모빌리티 주행환경 반영된 지능형 주행모드 연구
Sponsor: 현대자동차 남양연구소; 2020.04-2020.11
본 연구는 차량시뮬레이터기반으로 주행 환경에서의 운전자의 감정 및 운전성향 데이터를 취득할 수 있도록 실험을 설계 및 진행한다. 운전자에게 취득되는 생체데이터는 감정 판단에 사용되며, 이는 지능형 주행모드 개발에 대한 기초 연구자료로 사용된다.

장기 주행 운전자의 안전운전을 위한 첨단안전운전 시스템 및 서비스 개발
Sponsor: 산업통상자원부; 2019.05-2021.12
본 연구는 실차 데이터를 통해 장기 주행하는 운전자들에게 발생하는 비정상 및 위험상황에 대한 첨단 안전운전 시스템 및 서비스를 개발하는 목적으로 한다. 구체적으로는 장기 주행하는 운전자의 행동과 상황에 대한 선행 연구 심층조사를 통해, 비정상 및 위험상황을 정의하고 분석을 실시한다.

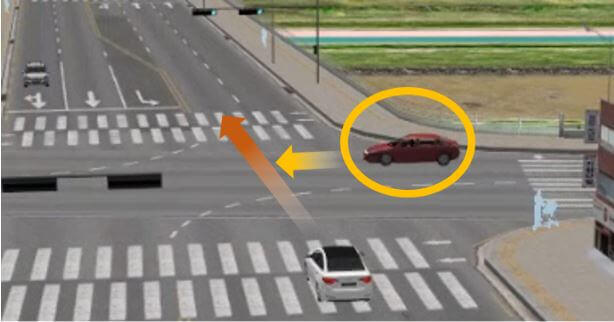
위험인지 상황 운전자 행동 특성 연구
Sponsor: 국립과학수사연구원; 2019.05-2020.11
본 연구는 차량시뮬레이터기반으로 위험인지 상황에서의 운전자 행동 특성 데이터를 취득할 수 있도록 실험을 설계 및 진행한다. 운전자 행동 특성데이터는 위험인지 상황에 대한 운전자 행동 패턴 및 인지반응시간 도출에 사용되며, 이는 교통사고 상황에서 운전자의 고의성 여부를 파악할 수 있는 감정기법에 대한 기초 연구자료로 사용된다.
기계학습을 이용한 운전자 특성 반영 모델 개발
Sponsor: 현대모비스; 2019.03-2019.11
본 연구는 차량 시뮬레이터 기반으로 운전자의 운전 성향 별 주행데이터를 취득할 수 있도록 실험을 설계하고 진행한다. 주행데이터는 운전자의 특성이 반영된 가상의 운전자 모델 개발에 사용되며, 자율주행 자동차를 위한 가상환경에서의 보다 사실적인 운전자 모델 제공을 목적으로 한다.
이상기후 시 운전자 행동 분석을 통한 주행안전성 개선방안 연구
Sponsor: 현대자동차 남양연구소; 2018.11-2019.05
본 연구는 시뮬레이터 상황에서 이상기후 시 운전자 행동 패턴 분석 실험을 설계하고 진행한다. 이상기후 시 차량 및 운전자 관련 정량·정성 지표를 분석하고 운전자 행동 기반의 주요 불편 요소를 도출함으로써 이상기후 상황에서의 주행안전성 개선방안 확립을 목적으로 한다.

자율주행 고객 신뢰 위협요인 분석 및 개선방안
Sponsor: 현대자동차 남양연구소; 2018.06-2018.11
본 연구는 자율주행차량의 기술 발달과 소비자의 신뢰가 비례하지 못함에 따라 적정 신뢰 관계를 형성할 수 있는 HMI 측면의 요구사항을 도출한다. 이번 연구는 자율주행차량에서의 신뢰(Trust)를 정의하고 사용자의 신뢰 측정 환경 및 신뢰 위협 시나리오 구현을 통해 신뢰 관련 자율주행 UX/HMI 요구사항 수립을 목적으로 한다.

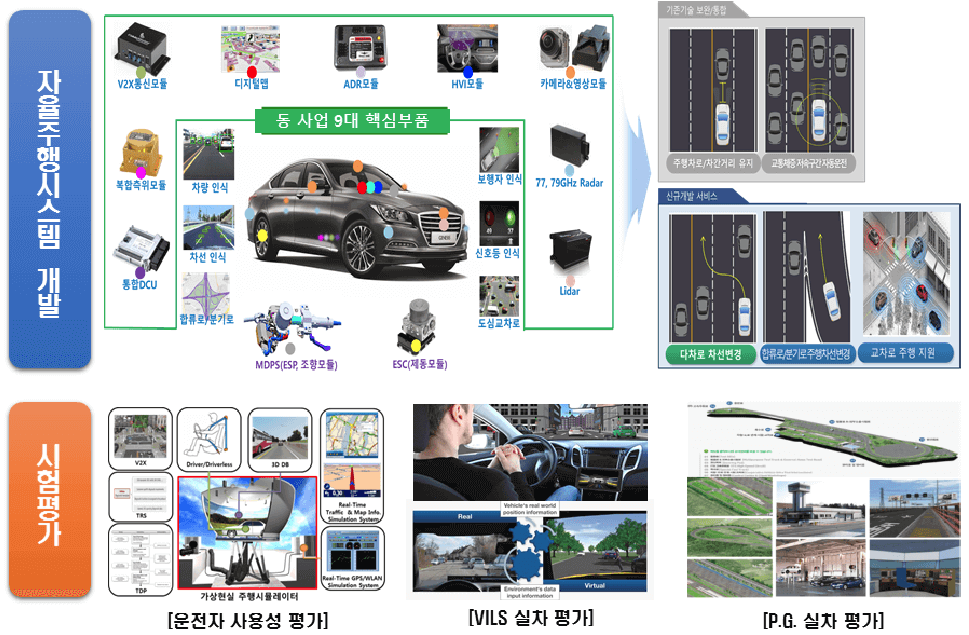
자동차전용도로·도심로 자율주행 시스템 개발 및 성능평가
Sponsor: 산업통상자원부; 2017.05-2021.12
본 연구는 완성차 및 수요기업의 요구사양이 반영된 레벨 3,4단계의 자율주행 시스템 개념을 정립하며, 자동차 업계의 요구사항 기반의 자율주행기술을 개발하고, 자율주행용 국산 부품과 시스템의 SW 성능을 시스템 관점에서 평가하는 것이 목표이다. 이번 연구의 개발 대상 기술은 자동차전용도로와 도심로 자율주행 시스템 개발과 가상현실 및 P.G환경에서의 시스템 평가 기술이다. 이번 연구의 개발 대상 기술은 자동차전용도로와 도심로 자율주행 시스템 개발과 가상현실 및 P.G환경에서의 시스템 평가 기술이다.
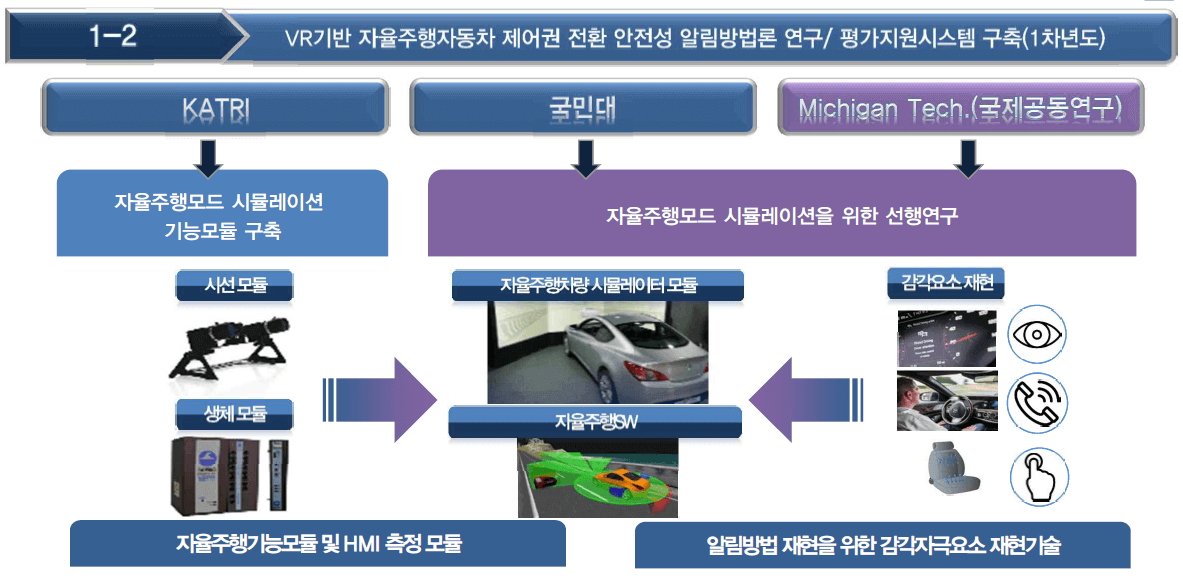
자율주행자동차 차량·운전자 제어권 전환 안전성 평가기술 및 사회적 수용성 연구 1단계
Sponsor: 국토교통부; 2017.04-2021.03
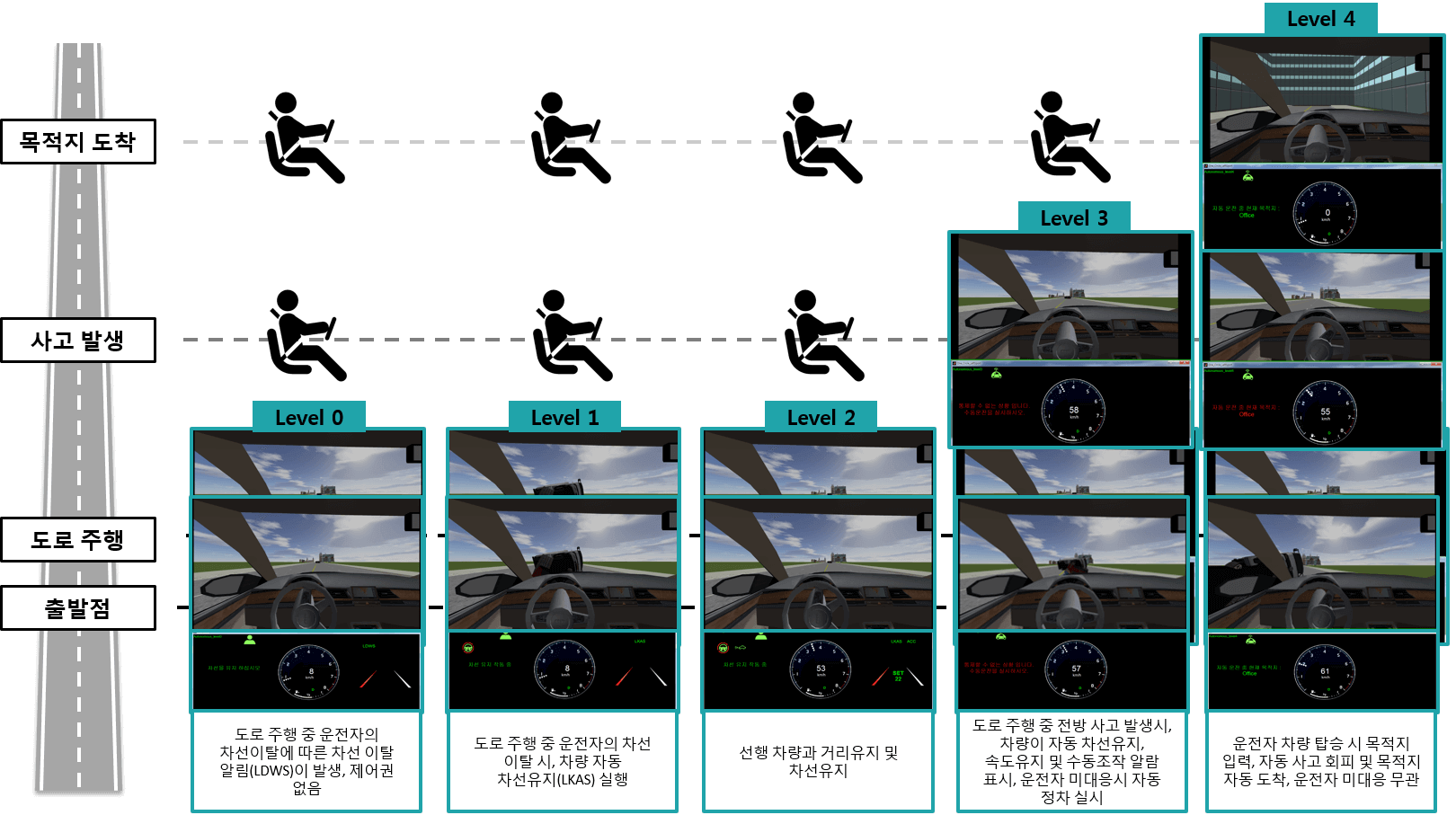
본 연구는 자율주행자동차 레벨 3 기준으로 주행상황에 따라 운전의 주체가 차량 혹은 운전자 사이에 전환될 경우 안전성이 확보된 상태에서 적정하게 전환되는지 여부를 확인하고 평가하는 기술과, 평가지원 시스템을 통한 설계 가이드라인을 개발을 목표로 하는 연구이다. 이에 따라 HuVA연구팀은 자율주행차량 요인을 고려한 대표 위험 시나리오를 정의하고 자율주행차량 고장 상황별 제어권 전환 안전성 평가 시나리오를 개발한다. 또한 VR기반 제어권 전환 알림방법 연구 및 안전성 평가지원시스템 구축, VR기반 제어권 전환 알림평가 실험 및 알림방법 안전성 평가지표 분석을 실시한다.
운전자(시트)를 고려한 R&H 성능 예측 기법 개발
Sponsor: 현대자동차 남양연구소; 2017.04-2018.04
본 연구는 차량 시뮬레이터 환경에서 운전자를 고려한 R&H 성능 예측 기법 개발을 위해 차량 설계인자와 운전자 반응과 R&H 동특성 지표 사이의 상관관계 분석과 타당성 검증을 목표로 하는 연구이다.
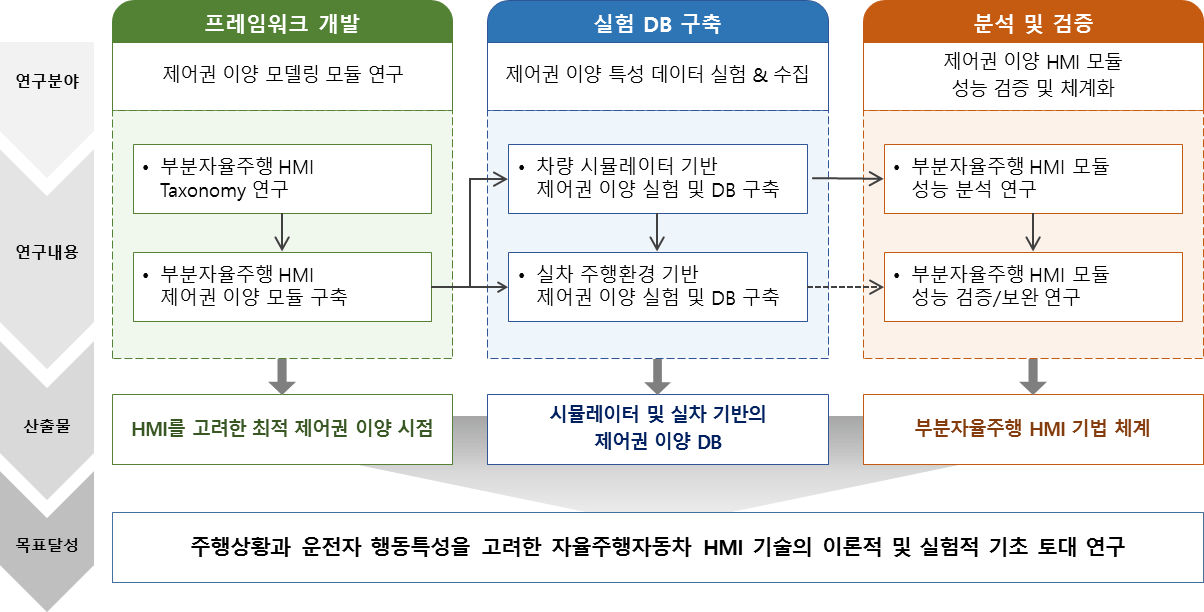
실차 및 시뮬레이션 실험 기반의 안전한 제어권 이양을 위한 부분 자율주행차량의 체계적 HMI 기법 연구
Sponsor: 한국연구재단; 2017.03-2021.02
본 연구는 안전한 제어권 이양을 위한 부분 자율주행차량의 체계적인 HMI 기법의 연구를 목표로 하는 연구이다. 이에 따라 HuVA연구팀은 1차년도에는 부분자율주행 HMI taxonomy 연구 및 부분자율주행 HMI 제어권 이양 모듈 구축을, 2차년도에는 차량 시뮬레이터 및 실차 기반 제어권 이양 실험 및 DB구축을, 3차년도에는 부분자율주행 HMI 모듈 성능 분석 및 검증 연구를, 4차년도에는 운전자-차량 상호작용을 고려한 제어권 이양 HMI 설계 프레임워크 구축 학제간 융복합 연구를 통한 HMI 기초 토대 수립을 진행할 것이다.
자율주행 레벨 혼재 상황에 따른 복잡도 연구
Sponsor: 현대자동차 의왕연구소; 2016.07-2017.07
이번 연구는 기존의 자율주행차량의 제어에 관한 연구와 달리, 다양한 자율주행 레벨의 차량이 혼재된 상황에서 수동 운전자 및 자율주행차량 시점의 주행 상황 복잡도를 나타내는 척도를 산정하고, 이를 컴퓨터 시뮬레이션과 human-in-the-loop 실험을 통해 연구한다.

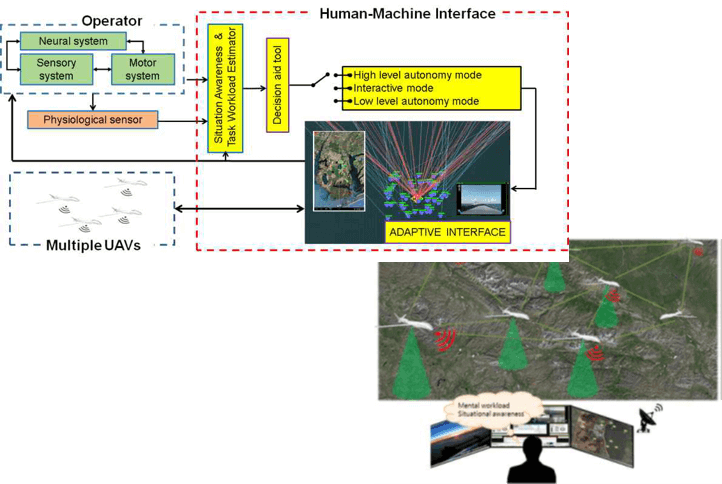
지능기반 무인기 제어 특화연구실: 제3과제 복수무인기 운용자 임무과부하 최소화를 위한 HMI기술
Sponsor: 국방과학연구소; 2015.11-2017.12
본 연구는 복수 무인기 운용자의 임무 과부하 모델링을 위한 이론 정립과 임무부하 상태의 추정을 반영한 적응형 모의 인터페이스 개발을 목표로 한다. 이에 따라 기존의 복수 무인기 운용자 임무과부하 측정 및 모델링에 관한 선행 연구들을 비교 분석하고, 해당 결과를 토대로 시선 정보 및 심박 수를 이용하여 메타 지표인 임무과부하를 추정, 개발하는 연구를 진행하고, 복수 무인기 운용을 위한 지상체 연구를 위해서는 단일 무인기 운용을 위한 지상체 UI 설계를 한다. 또한, 복수 무인기 운용을 위해서 필수적인 비행 상태 정보들을 식별하여 전시해야 하며, 다개체 선택 및 명령 전송의 기능이 요구되므로 운용자의 임무과부하 상황을 분석하기 위해 다수의 무인기를 그룹화하여 특정 지역에 임무상황을 부여하여 운용자가 복수무인기를 운용하는 시나리오를 구성한다.
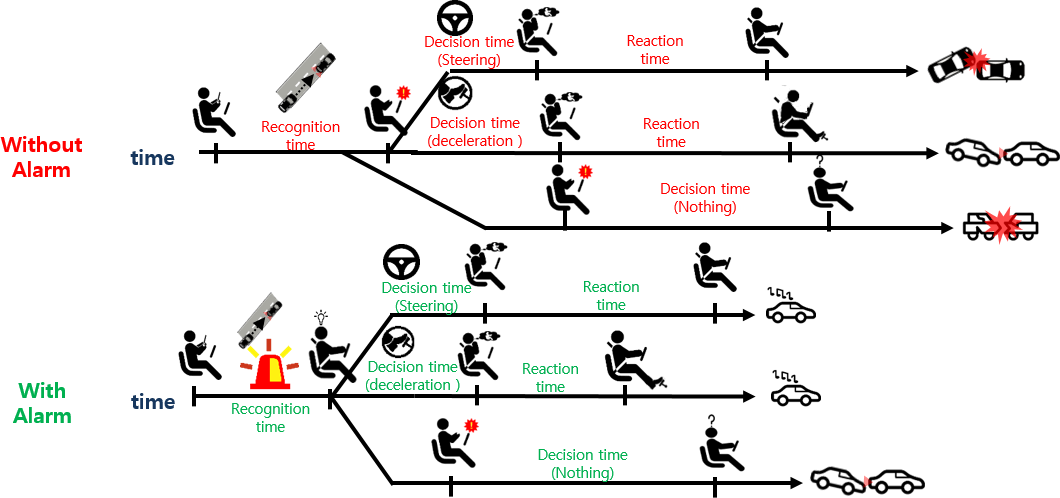
자율주행 시대의 탑승자 안전을 위한 Human Factor 연구
Sponsor: 현대자동차 의왕연구소; 2015.11-2016.04
본 연구는 기존에 존재하는 운전 보조장치의 알림 기능 및 충돌 예측을 개선하는 목적으로 하며, 고속도로에서 전방 차량이 급하게 정차할 때의 운전자 동특성을 고려하여 충돌 확률을 계산하고, 경보 유무 및 시점을 제시하는 예측 알고리즘 개발을 목표로 한다. 이에 따라 ① 고속도로 주행 상황에서 선두 차량의 급정지에 따른 FCWS 충돌 및 알람 모델링 ② 고속도로 주행상황에서 선두 차량의 급정지에 따른 운전자 행동 모델링 ③ 시뮬레이터 기반 Human-in-the-loop 실험을 통한 알고리즘의 효용성 검증 등을 실시하여 연구를 진행한다.
사물인터넷 환경을 고려한 자율협력주행 차량 운전부하 측정 기법 연구
Sponsor: IITP(정보통신기술진흥센터); 2015.10-2016.06
모든 사물과 차량이 인터넷을 통해 서로 연결되고, 사물인터넷 시대가 본격화되면서 정보량이 증가함에 따라 운전자는 운전 행위 외에 다른 정보들을 받아들여야 한다. 이는 운전자의 작업부하를 증가시킨다. 본 연구에서는 기계-자동차 분야를 중심으로 ICT-SW 공학, 심리 공학, 신경 과학 등의 학제간(Multidisciplinary) 신규 융합 연구개발 분야 발굴 및 기초연구 저변 확대의 목적으로, 자율협력주행 차량과 복잡하고 복합적인 사물인터넷 환경 특성을 고려한 운전부하 측정 기법을 연구하는 것이다. 이에 따라 ① 운전부하 관련 선행연구 조사분석을 통한 상태 운용 정의 및 측정지표 선정 ② 사물인터넷 관련 선행연구 조사분석을 통한 운용 정의 및 상호작용지표 선정 ③ 시뮬레이터 기반의 운전부하 측정 시나리오 수립 및 실험 방법 제시 ④ Human-in-the-loop 실험을 통한 데이터 수집 및 기술통계적 분석 및 운전부하 측정 기법 제시 등을 실시하여 연구를 진행한다.
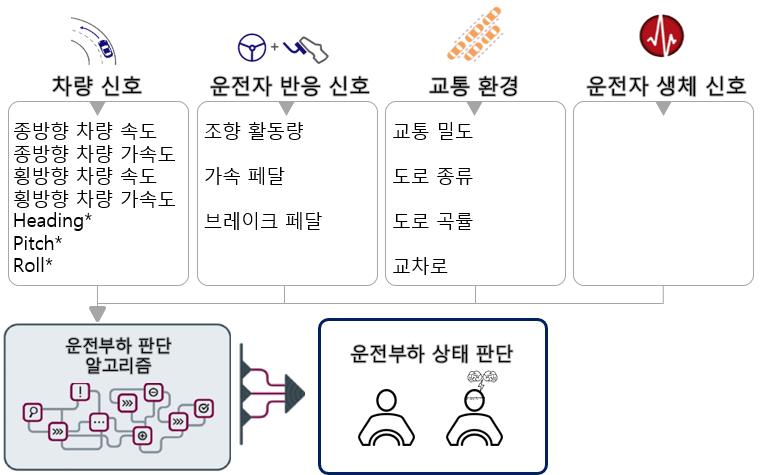
운전부하 판단 알고리즘 개발 을 위한 기초연구
Sponsor: 현대자동차 남양연구소; 2015.09-2016.08
본 연구는 운전부하 판단 시스템 기술 개발을 위한 기초 연구 목적으로, 구체적으로는 운전부하 관련 선행 연구에 대한 심층조사, 실차 기반 운전과부하 상태 측정 연구, 운전부하 정의 및 주행 시나리오 설계를 목표로 한다. 이에 따라 HuVA연구팀은 ① 운전부하 정의 및 측정 지표 도출 ② 실차 기반 운전부하 유도 및 측정 실험 설계 ③ 운전부하 측정 human-in-the-loop 실험을 통한 데이터 획득 ④ 운전부하 판단 알고리즘 개발 및 평가 등을 실시하여 연구를 진행한다. HuVA의 이번 연구는 차량 지표의 심도있는 분석을 이용하여 운전부하 상태 판단 알고리즘을 개발한다.
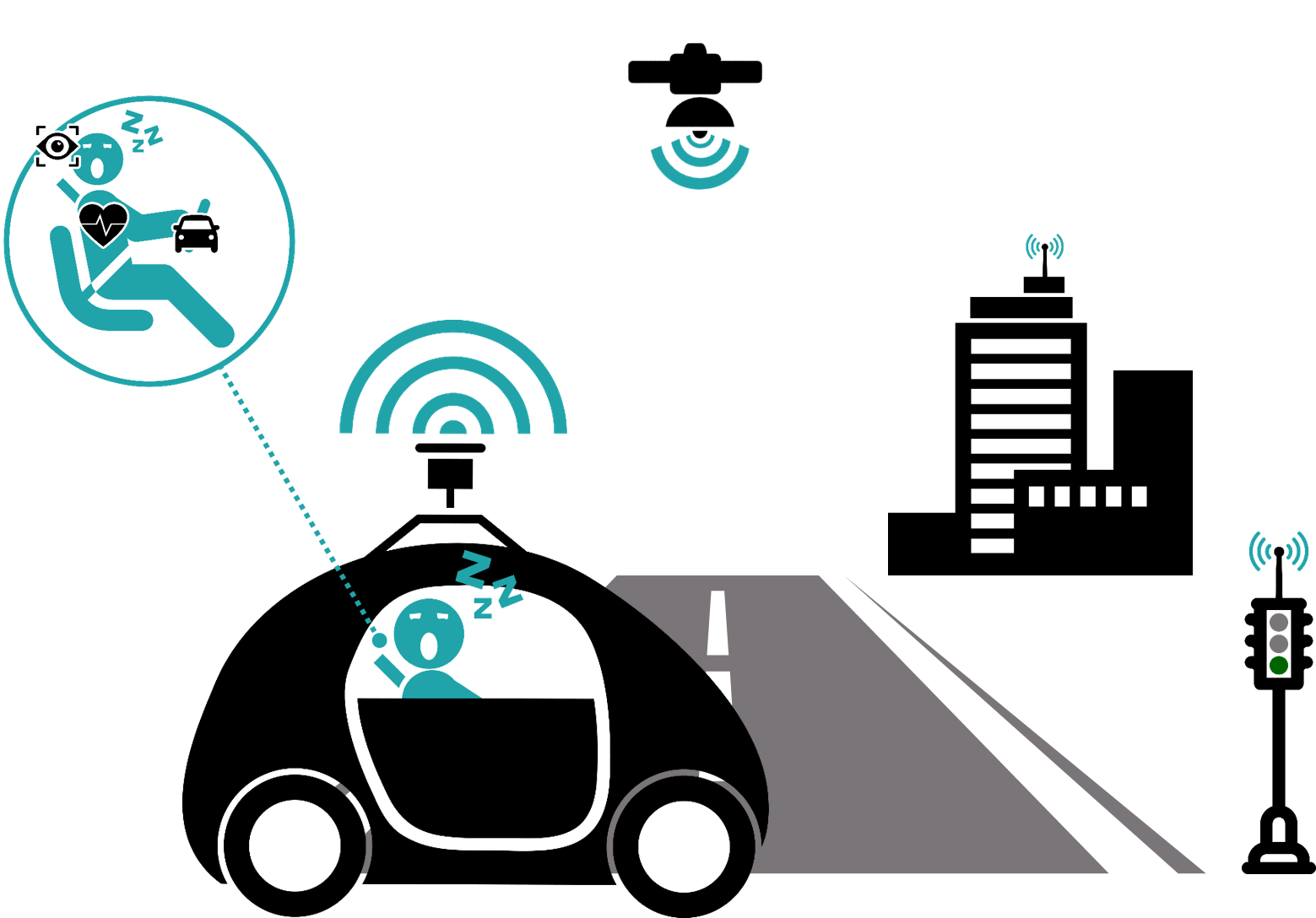
미래 교통 환경을 고려한 운전자 피로 측정 기법 연구
Sponsor: 경찰청; 2015.07-2016.06
미래 운전 환경을 고려한 HMI (Human-Machine Interaction) 기술연구를 통해 개발될 상호작용 인지 모델 및 모듈의 핵심 기술은 무인화, 지능화, 복합체계화 된 교통시스템을 효율적이며 안전하게 구현하는데 이바지 할 수 있으며, 미래 교통기술과 관련 인터랙션 기술 개발을 위한 설계 요구를 과학적으로 도출할 수 있는 기초 연구자료를 제공할 것으로 기대된다. 이에 따라 본 연구의 목적은 치안과학기술분야에서의 신규 R&D 분야 발굴 및 기초연구 저변 확대의 일환으로, 미래형 교통 시스템 중 자율주행 차량의 자동화 레벨에 따른 운전자 피로를 측정하는 기법을 연구하는 것이다.
수동 및 자율주행 차량 운전자 과부하 판단 알고리즘 개발
Sponsor: 현대자동차 남양연구소; 2014.12-2015.06
본 연구는 미래형 자동차의 운전자 상태 판단 시스템 기술 개발의 타당성 검증을 목적으로 하며, 구체적으로는 운전과부하 판단 선행 연구에 대한 심층조사, 수동 주행 기반 운전과부하 상태 측정 연구, 선행 연구 기반 운전 과부하 정의 및 주행 시나리오 설계를 목표로 한다. 이에 따라 HuVA연구팀은 ① 시뮬레이터 기반 수동 및 자율 주행 차량 구현, ② 차량 자동화 레벨 별 운전 임무 및 시나리오 정의, ③ 시뮬레이터 기반 운전자 과부하 상태 측정 human-in-the-loop 실험을 통한 효용성 검증, ④ 수동 및 자율 주행 차량 운전자 과부하 판단 알고리즘 개발 및 평가 등을 실시하여 연구를 진행한다. HuVA의 이번 연구는 다양한 주행 지표와 운전자 지표를 활용한 운전과부하 상태 판단 알고리즘에 대한 특허명세서 작성을 제시한다.
적응형 자율주행 인간-차량 인터랙션의 하향식 규범 모델 연구
Sponsor: 한국연구재단; 2014.05-2017.04
본 연구는 다양한 자동화 수준의 자율주행자동차에서의 효과적인 실시간 운전자-차량 상호작용 모니터링 기법의 기반이 되는 하향식(top-down) 정량적 모델링을 통하여 단편적인 생체신호 분석을 지양하고, HVI 데이터를 의미화하고 규범 모델(normative model)을 정립하여 인간 중심의 스마트카(자율주행자동차) 통합기술을 개발하는 것을 목표로 한다. 이를 통하여, 신생 분야인 HVI의 이론적인 틀을 마련하고, 시뮬레이터와 실차를 이용한 실험을 수행하여 HVI 모델링을 검증할 데이터를 확보한다. 이에 따라 다양한 자동화 수준이 가능한 미래형 스마트카(자율주행자동차)에서 하향식(top-down) 정량적 모델링을 통하여 체계적으로 상황을 인식하여 운전자에게 최적의 자동화 수준을 제공해주는 기법을 개발하여 보다 편리하고 안전한 운전이 가능하도록하는 연구를 제안한다.
지능형 Interface 기반 운전자 UX 선행 개발
Sponsor: Hyundai MOBIS; 2013.12-2014.11
위 과제는 기존의 수동적 정보 제공의 역할에 충실한 전통적 Cockpit과 비교하여, 능동적으로 운전자의 정보를 처리하고 Interaction하는 지능형 칵핏 시스템의 구현을 목표로 한다. 이에 따라 HuVA연구팀은 제작된 지능형 Cockpit UX시나리오를 받고 자체적으로 시나리오를 개발하여 Display(Cluster+AVN 통합)에서의 구현을 주행 환경(ADAS system, 외부 차량, traffic, etc..)에서의 시뮬레이터로 구현하여 지능형Cockpit 운전자 수용성 평가를 수행 하고 그 결과를 정량적/정성적 지표로 제시한다. HuVA의 이번 연구는 미래의 운전자 입장에서 영향이 있는 요소에 대한 Concept의 가이드라인을 제시 한다.
운전자 상태와 주행 환경 분석을 통해 안전과 편의를 제공하는 Connectivity 기반의 개인 맞춤 지능형 통합 Cockpit 모듈 개발
Sponsor: 산업통상자원부; 2013.11-2017.08
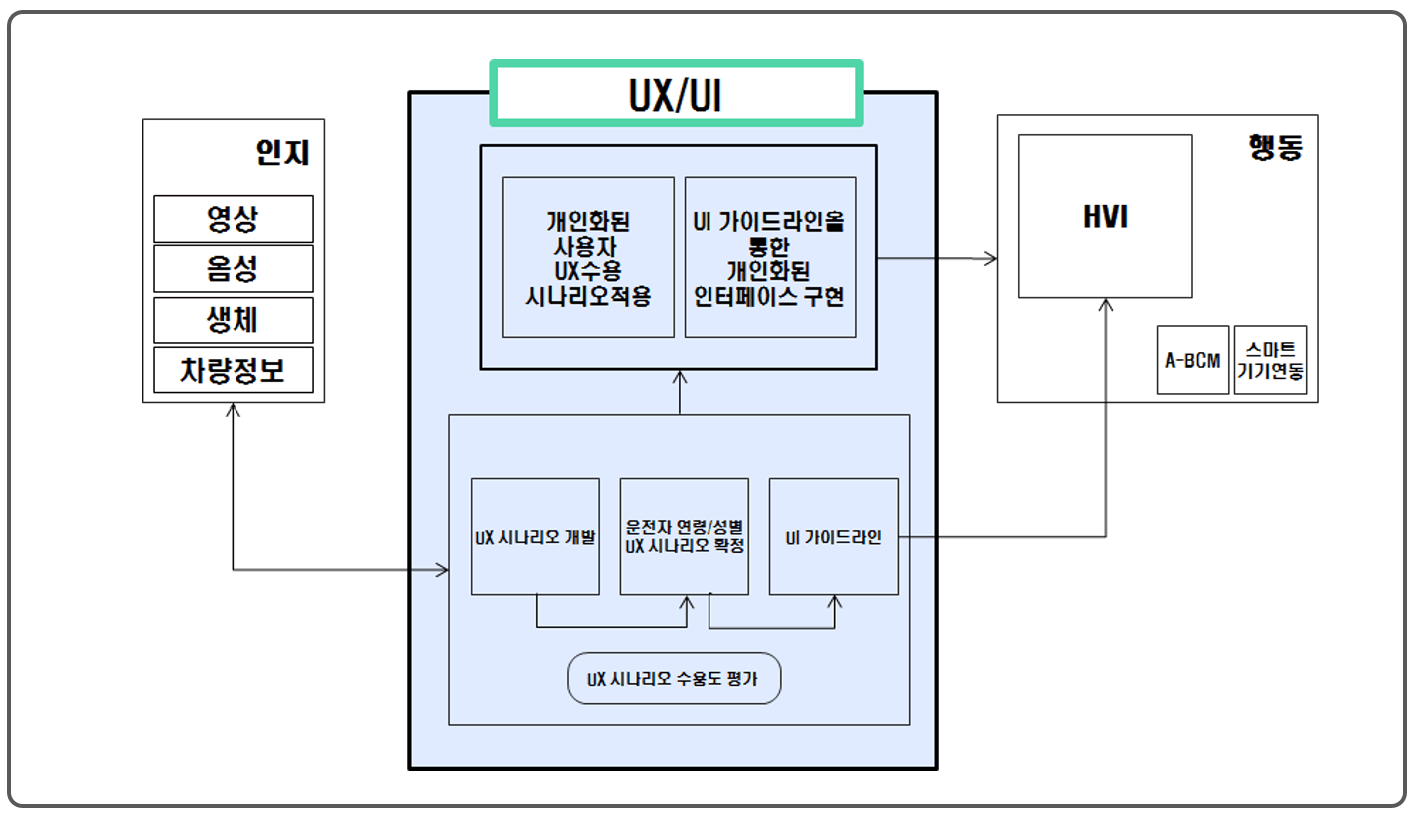
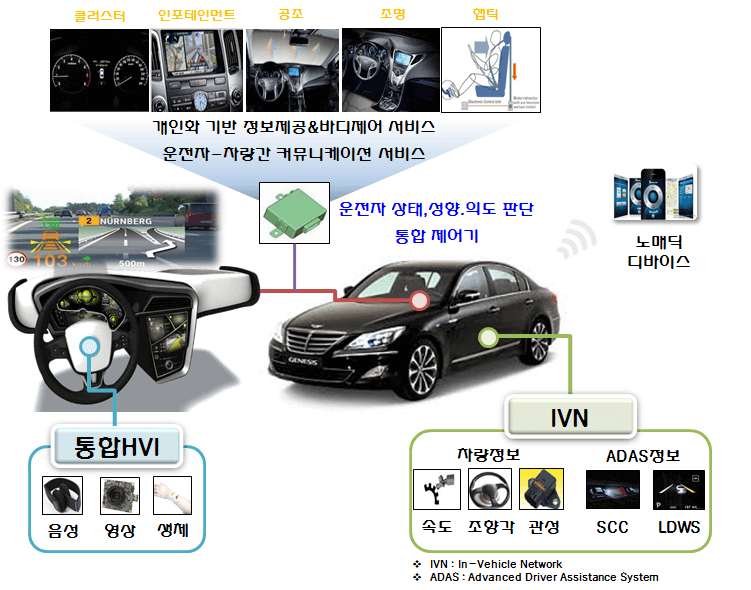
다양한 실도로 주행환경에서 생체/영상/음성인식을 활용한 통합 HVI(Human Vehicle Interface) 기반의 운전자 상태, 성향, 조작의도를 파악하고 이를 차량정보(In-Vehicle Network, 이하 IVN, 및 ADAS 정보)와 융합하여 운전자의 주행 안전성과 편의성을 향상시키고 운전자와 차량의 최적화된 상호작용을 제공하기 위한 개인화된 통합 HVI 기반의 지능형통합(Intelligent) Cockpit(이하, i-Cockpit) 모듈 상용화 기술 개발을 한다. 본 과제에서의 기술 개발은 다양한 실도로 주행환경에서 사용자 경험과 인간공학적 관점에서 개인화된 UX 시나리오와 운전자의 주의력 분산을 방지할 수 있는 i-Cockpit UI 가이드라인을 도출하는 HF/UX부, 통합 HVI(생체/영상/음성/IVN)기반 운전자 상태/성향/의도 인식을 위한 HW 및 운전자 운전부하 및 주행 성향 표준 DB를 구축하는 HW부, i-Cockpit 도메인 아키텍처 설계, 통합 HVI 기반 운전자 상태/성향/조작 의도 통합 판단 SW 및 다중 커뮤니케이션 서비스, 개인화된 운전자와 인터랙티브한 정보제공 및 차량 시스템 제어 기술 및 서비스를 개발하는 SW부, UX시나리오 및 UI 평가, 실도로 주행환경모사용 공용 환경기반 통합 HVI 기능/성능 검증, 상용화 수준의 전자파, 내환경 신뢰성 평가 및 운전자 수용성, 차량 전장 SW품질 확보를 위한 평가/검증부로 구성되어 있다.
미래지상체계특화연구실: 지상전투차량 성능모의/분석 이론 및 적용기법 연구
Sponsor: 국방과학연구소; 2013.10-2018.12
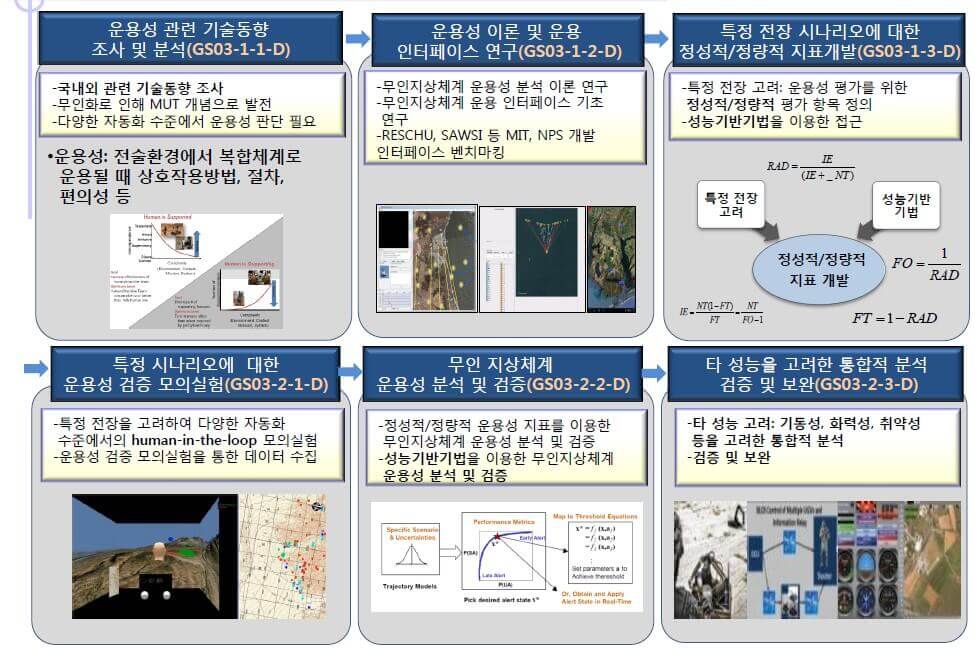
본 과제의 목적은 『무인 지상전투체계의 성분분석에 필요한 체계기능(기동/명중률/취약성⦁운용성 예측 및 분석)을 확보』하여 미래 지상 전투차량 성능모의 및 분석에 활용하는데 있다. 1단계에서는 지상전투체계 주요 성능요소 모의/분석 이론을 습득하며, 이를 위해서 지상전투체계 주요성능 모의/분석 사례를 연구 분석하고, 미래 지상전투체계의 각 주요 성능 요소별 수학적, 공학적 핵심이론을 습득하여, 성능 모의/분석 기법을 정립한다. 2단계에서는 성능모의/분석이론 검증 및 모델 구현을 위한 알고리즘을 구현하는데, 이를 위하여 성능 모의/분석 이론 및 기법 검증을 위한 기본 모델링을 하며, 성능요소별 이론을 검증한 후에, 성능요소별 모의/분석모델 구현 최적 알고리즘을 구현한다.
주의분산 운전을 예방하기 위한 제스처 기반 인터페이스 개발
Sponsor: 한국과학창의재단; 2013.09-2014.02
본 연구는 운전 중 주의분산 최소화를 기대할 수 있는 휠제스처 및 일반제스처 컨트롤 인터페이스를 개발하여, 기존 입력 방식인 버튼-다이얼 및 휠제스처 입력 방식들과의 정량적이고 정성적인 비교 분석을 수행한다. 이를 위해 주행 시뮬레이터 환경에서 주행 성능 및 기기 조작 등에 관한 데이터를 수집하고 헤드 트래커 및 아이 트래커를 활용한 시선 데이터를 수집 분석하여 정성적 및 정량적인 비교를 수행한다. 궁극적으로는 본 연구에서 활용된 일반제스처 인터랙션이 운전자 주의분산을 고려한 차량 정보 시스템 및 운전자 지원 시스템 개발의 기반이 되도록 한다. • 차량 내 자주 사용하는 기능을 선정하고, 그 기능을 휠을 잡은 상태에서만 조작이 가능한 휠제스처, 휠을 놓은 상태에서도 사용할 수 있는 일반제스처 인터페이스를 개발한다. • 시각주의분산 시나리오 선정, 측정 변수 선정 및 시뮬레이터 기반 실험 수행으로 정량적인 데이터를 수집한다. • 버튼-다이얼 방식과 휠제스처 방식 그리고 일반제스처 방식의 효용성을 통계방법을 이용하여 정량적으로 비교 평가한다.
감성 기반 지능형자동차 인터랙션에 대한 공학-디자인 융합 연구
Sponsor: 한국연구재단; 2013.08-2013.12
"인간중심" 학제간 융합 주제를 발굴•기획하여 RFP를 도출하는 융합연구 개발 과제로써, 계획적인 선행연구를 수행하여 구체적인 과학기술과 인문사회의 융합 과제 (인간감성-지능형 자동차 인터랙션 과제)를 도출한 후, 중장기적인 융합과제의 연구 진흥을 도모한다. 본 연구회 활동을 통해 해당 연구 인력 등의 융합 연구 여건을 조사하여, 계획적이고 장기적인 과학기술과 인문사회의 융합의 발전을 준비한다. NUI(Natural User Interface)와 관련된 기술개발이 확대됨에 따라 자동차에도 NUI와 관련된 기술을 활용하여 보다 만족도 높은 운전경험 제공 필요하다. 지능형 자동차에서 운전자의 감성 및 인지상태를 시선 추적 방법등과 같은 과학적인 방법을 통해서 실험•검증하며 운전자의 기호도와 선호영역을 추출하고, 소비자의 선호도 및 만족도 향상 및 판매활성화에 기여가 필요하다. 능동안전시스템, 지능형자동차, 무인자동차 등 고자동화기술도입으로 인한 새로운 개념의 인간-자동차 시스템 레벨 연구가 필요하다. 기존 수동(manual) 운전 임무에서 감시(supervisory) 제어 임무로 인간과 자동차에 각각 요구되는 다양한 임무 특성 이해 및 임무 책임 이해가 필요하며, 다양한 자동화 레벨에 따른 운전 모드 변환 혼동을 최소화하고, 각 요소간의 신뢰 형성 등에 대한 대책이 필요하다.